overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.

Just helping people typing LaTeX in Vietnamese
Pakiet dostarcza makropolecenia \shabox pozwalającego zrobić cieniowaną ramkę wokół tekstu. Czytaj więcej na: http://pakietomat.wordpress.com/

A quick look at Merkle's puzzles and it's legacy.
Templates for BSc/MSc/PhD thesis or final projects, including flyer and beamer presentation, at Dipartimento di Fisica e Astronomia "Ettore Majorana", Università di Catania, Italy

Como Instalar Ubuntu 18.04 En VirtualBox
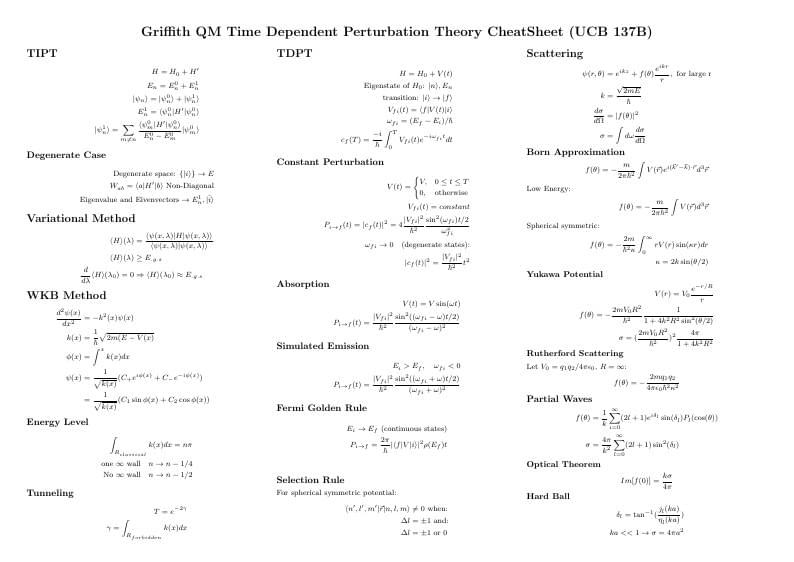
This is a cheatsheet made for the final exam of Berkeley Physics 137B. It mainly covers chapters from Variational Method to the end (except for Adiabetic Approximation).
Une Template belle et pratique pour préparer l'oral de francais.
The second project for MATH 2400, Calculus II, at Fitchburg State. Estimating volume using definite integrals.

In this paper we will study an algorithm designed by Madgwick which is commonly used to determine the orientation of a quadcopter. The algorithm uses a group of accelerometers, gyroscopes and magnetometers integrated in what is called an IMU as input. Some differences have been found between the results obtained by the original paper and the implementation done by the author. Therefore, a thorough study has been made, finding a miscalculation in the equations. The results show a relative average error in the orientation of 1,44 ppm.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.