overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.
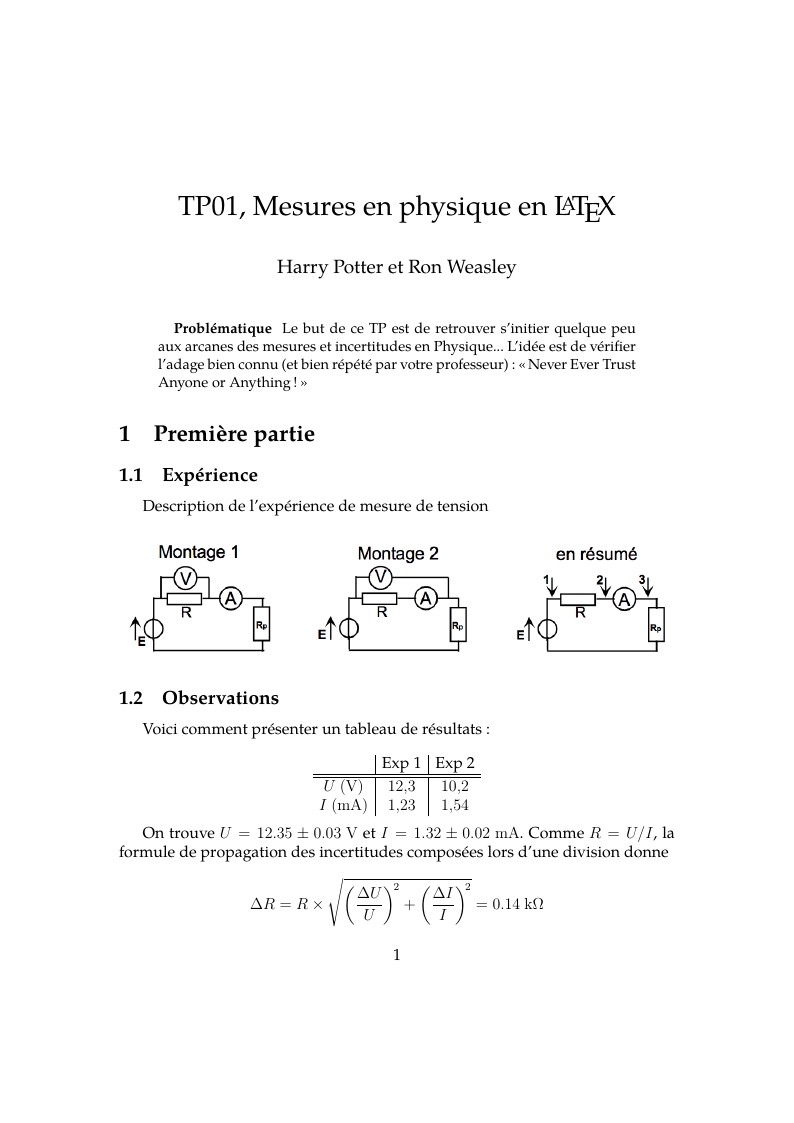
Modèle pour compte-rendu de TP de Physique
This template provides a style file for the easy preparations of NSF grant proposals. As part of the template, a list of pre-defined journal abbreviation commands are included, for easy reference in your proposal. See also the NSF biographical sketch ("biosketch") template available here.

Estas instrucciones constituyen una guia para la preparacion de articulos para la revista RIAI. Utilice este documento como un conjunto de instrucciones. Tambien puede usarse como una ``plantilla'' para preparar su manuscrito. Para las directrices de envio, siga las instrucciones del sistema de envio de articulos de la pagina web de la revista.
These are the words that I manifest.
A simple beamer template to be used by Western Mindanao State University, College of Science and Mathematics, Department of Mathematics and Statistics, BS- Mathematics and BS-Statistics Students for their Seminar Paper Oral/Final Presentation.

LaTeX beamer theme for NJUPT students. Chinese support. This template mostly comes from Jiayi Weng, Trinkle23897. His github repo is https://github.com/Trinkle23897/THU-Beamer-Theme. Thank you very much Trinkle!
CSUThesis Latex 模板 本模板是中南大学论文 Latex 模板 CSUThesis,即 Central South University Thesis LaTeX Template. 学校的指导文件仅提供大致的格式描述与 word 示例,并没有提供官方的 LaTeX 模板,本项目意在维护一个学位论文的非官方标准(De facto standard),创建符合指导文件要求的 LaTeX 模板,主要由csu-disc0ver成员维护,原始仓库地址:https://github.com/disc0ver-csu/csu-thesis
Math 471 Homework 1
Dicas para a preparação de listas de exercícios da disciplina MAC0239 (Introdução à Lógica e Verificação de Programas) no IME-USP. Tips for preparing exercises for MAC0239 (Introduction to Logic and Program Verification) at IME-USP.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.