LaTeX templates and examples — Two-column
Kürzlich
MASC-SLL 2020 Submission Template
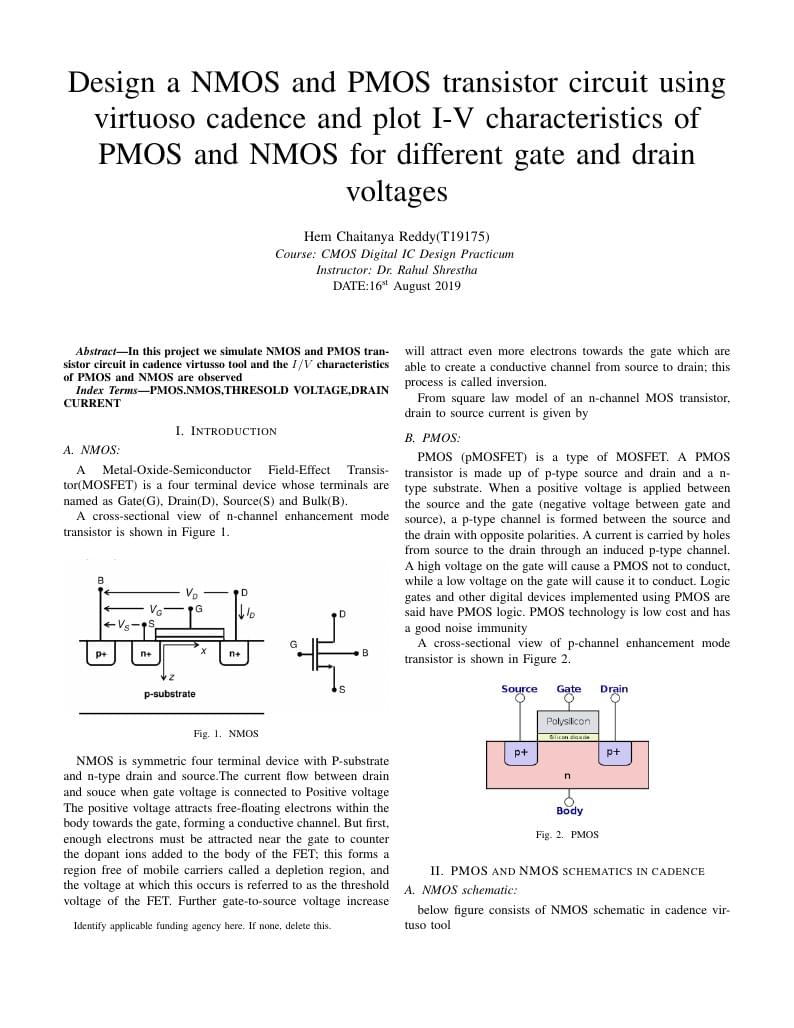
In this project we simulate NMOS and PMOS transistor circuit in cadence virtusso tool and the I/V characteristics of PMOS and NMOS are observed

This is version 5.0 of quantumarticle, the document class for typesetting articles in Quantum - the open journal for quantum science.
Plantilla para Reporte de Física Experimental

Latex template for formatting paper submissions to the Conference on Truth and Trust Online 2019 (4-5 October, London). Note from Overleaf: SyncTeX will not work correctly with this template (as well as templates which it is based on, eg CVPR, ACL, etc) when the line numbers are active. To make SyncTeX function while authoring your manuscript, either on Overleaf or in your own LaTeX installation, the line numbers have to be turned off by uncommenting \aclfinalcopy.

Avance previo de un proyecto para la universidad.

Final Project of the course named Scientific Researching Method. Our project was about emotional recognition

Com a evolução constante da eletrônica, a necessidade de produzir protótipos em placa de circuito impresso é cada vez mais cobrada e importante para se elaborar tecnologia de forma rápida, mas sem deixar a qualidade de produção baixa. Pensando nisso, este artigo propõe o desenvolvimento de uma fresadora CNC com base no comando numérico computadorizado para a confecção de trilhas na placa de circuito impresso de forma otimizada. Deste modo, são mostrados passo a passo os pilares teóricos que compõem a base de conhecimento para que se possa entender e desenvolver a ferramenta que irá usinar e por sua vez produzir o protótipo de forma eficaz. Os resultados obtidos em relação à montagem da ferramenta e o material usinado foi classificado com satisfatório, já que a máquina CNC conseguiu atingir seus objetivos, perfurando, cortando a placa e isolando as trilhas formando assim o circuito.
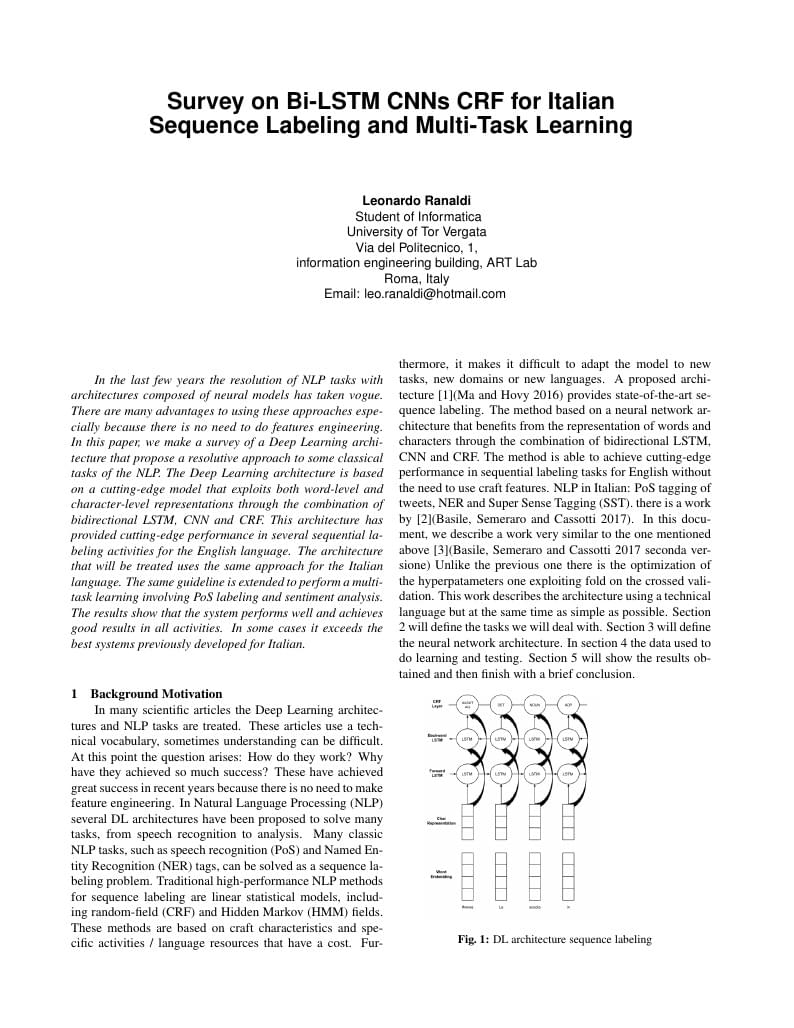
In the last few years the resolution of NLP tasks with architectures composed of neural models has taken vogue. There are many advantages to using these approaches especially because there is no need to do features engineering. In this paper, we make a survey of a Deep Learning architecture that propose a resolutive approach to some classical tasks of the NLP. The Deep Learning architecture is based on a cutting-edge model that exploits both word-level and character-level representations through the combination of bidirectional LSTM, CNN and CRF. This architecture has provided cutting-edge performance in several sequential labeling activities for the English language. The architecture that will be treated uses the same approach for the Italian language. The same guideline is extended to perform a multi-task learning involving PoS labeling and sentiment analysis. The results show that the system performs well and achieves good results in all activities. In some cases it exceeds the best systems previously developed for Italian.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.