LaTeX templates and examples — Math
Kürzlich
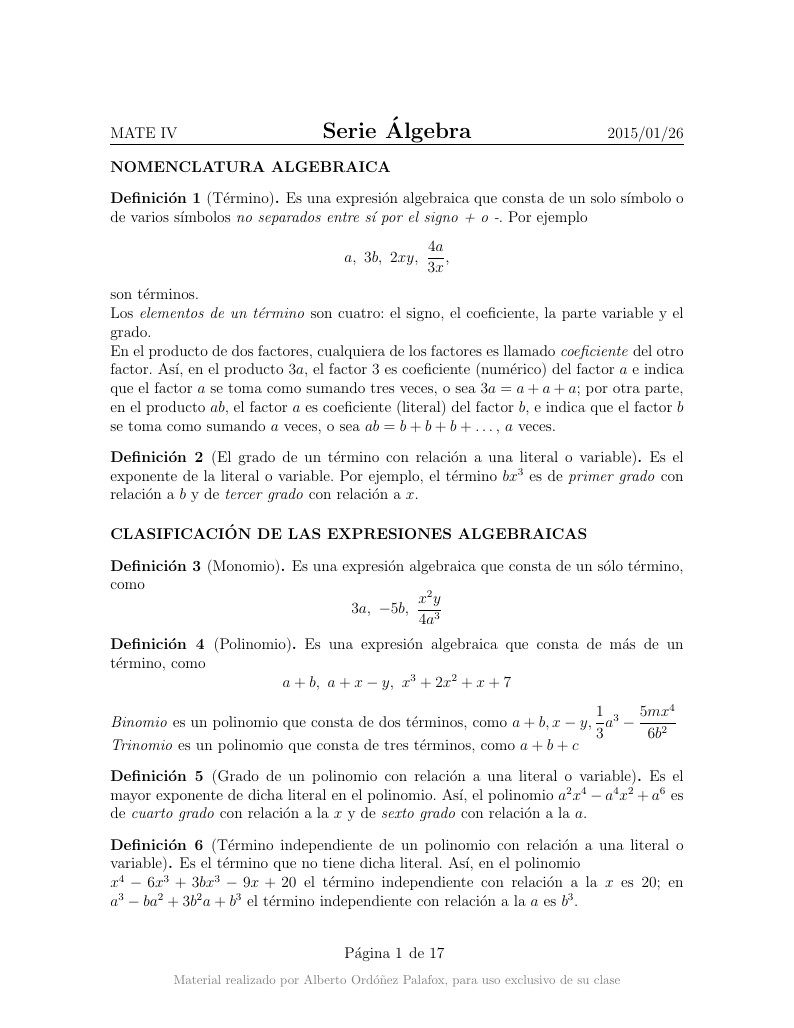
Ejercicios de álgebra tomados del Baldor (edición 1980). Algebra exercises from Baldor (1980 edition)
В данной работе представлено экспериментальное получение коэффициента поверхностного натяжения(КПН) жидкости. Также проверяется зависимость КПН от температуры. Устанавливается рабочий диапазон установки. В работе приводится разбор экспериментов проведанных автором работы. Исследовалось несколько видов жидкостей. Неорганические жидкости: Вода, Органические жидкости: Глицерин. Измерения проводились при температурах: 25 и 45, 50 градусов Цельсия.

Plantilla Repositorio de Matemáticas Escuela Colombiana de Ingeniería Julio Garavito
A homework template for Mathematical Tools for Computer Science (CPSC 202), an undergraduate course at Yale University. This template is designed to allow students to print out solutions in multiple parts, which are submitted separately to individual graders. It may also serve as an introductory template for LaTeX beginners.

Homework 2 for Discrete Math at CU Boulder in Summer 2019

This is the template for papers in the course Math 3600: Euclidean Geometry at the University of Northern Iowa
A LaTeX template for typing exams using exam package.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.